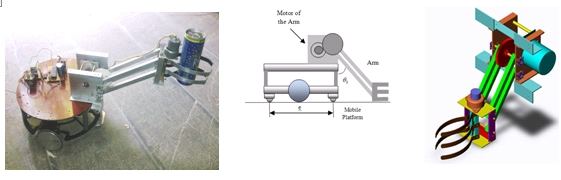
Mobile Robot One of research areas in Robotic Research Laboratory is Wheeled Mobile Robot (WMM). There are two WMM in Robotic Research Laboratory named Sweeper and Scout. . Sweeper Sweeper is manufactured and developed in Robotic Research Laboratory of Iran University of Science and Technology. It consists of a differential-drive wheeled mobile chassis and a one degree of freedom arm with gripper. The arm pedestal is mounted on a mobile platform and is capable to lift and carry the load. The platform contains two castor wheels in front and rear to keep the stability. The hardware system consists of arm/ control unit, processor boards for control of motorized wheels, Ultrasonic sensors to avoid obstacle and additional interface cards. The velocity is controlled by a PID controller.
. Scout Another Mobile Manipulator is a commercial, off the shelf wheeled mobile robot, Scout, from Dr. Robot Inc., the robot is controlled using a software launched on a pc which is in contact with the robot in a wireless network mesh. The robot is also shipped with a set of libraries to control the robot by providing different sets of methods. In our implementation we controlled the robot using velocity input for wheels and angle positions for link’s joints. Offline data is used as input for the program. In each step one set of wheels’ velocity and joints’ angles are read from input file and sent to the robot’s motion controller board. Prior to initiating this process, tuned PID values are provided to the robot. In each joint a safe angle range has been considered in which the joint can safely operate. At each step following sensory information is collected: Current flow of Motors, Speed of Encoders, Encoder positions and Angle position of each joint. Output files are later produced by saving above data in relevant files (i.e. current.txt, Encoder.txt etc.) 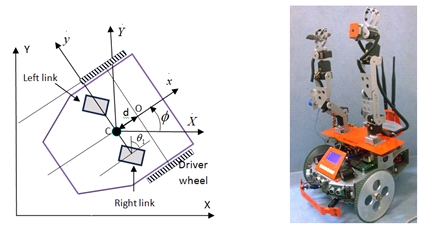 Related projects Ø Open loop research (Dr. Azimirad) · Theoretical researches: Dynamical modeling, Optimal Path Planning, Obstacle Avoidance, moving boundary optimization, Flexible joint Modeling, Load Carrying Capacity Calculation. · Experimental researches: Controlling the robot based on position and velocity feedback using PID, developing GUI on C# environments, Running the robot in open loop way and analyzing the results to verify simulation results Ø Closed loop research (Mr. Irani) · Theoretical researches: Closed Loop Optimal Path Planning, Load Carrying Capacity Calculation Experimental researches: Controlling the robot using Closed Loop Optimal Control, Running the robot in closed loop way and analyzing the results to verify simulation results |





