6R Serial Robot The manufactured 6R robot of IUST has 6 DOFs including 3 DOFs at the waist, shoulder and hand and also 3 DOFs in its wrist, which can do roll, pitch and yaw rotations. The first link rotates around vertical axis in horizontal plane; the second link rotates in a vertical plane orthogonal to first link’s rotation plane. The third link rotates in a plane parallel to second link’s rotation plane. A simple Delphi interface is designed for this robot that can control angular position of joints. Deviations in angular positions are export to the robot board via a serial port. The 6R robot and its environment have been simulated in simulator software, by mounting two cameras at a fixed distance on the ground observing the robot. These two cameras capture images from robot and surrounding, after image processing and recognition of the target-object and the end effector, positions of them are estimated in image plane coordinate, and then visual system leads the end effector toward target. 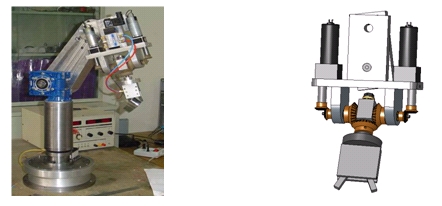
Related projects (Mr. Irani) Ø Design and manufacturing of 6R robot wrist and end effector Ø Analysis and design of end effector using multimedia software Ø Design and manufacturing of 3R robot Ø Simulation and Experiment for Performance Tests of 6R Robot Ø Vision-based control of 6R robot, Simulation and experiments Implementations of path planning and control algorithm on 6R robot |





